Humanoid Robot, Reads Human Expressions and Replaces Parts by Itself... Development Support in Full Swing
- Input
- 2025-05-29 14:44:53
- Updated
- 2025-05-29 14:44:53
Ministry of Science and ICT Introduces 'Next-Generation Physical AI Model-Based Humanoid Future Technology Development Strategy'
[Financial News] Humanoid robots based on Physical Artificial Intelligence (AI) are being developed to integrate various senses in real-time even in new real environments. The plan is to enable them to feel subtle pressures or vibrations, read human expressions, collaborate with other robots, and independently recognize and repair part replacements.
The Ministry of Science and ICT, on the 29th, held the 'Future Convergence Forum 2025 First Half Session (Subtitle: Next-Generation Physical AI Model-Based Humanoid Future Technology Development Strategy)' at Seoul National University's Haedong Advanced Engineering Hall, with experts from industry, academia, and research, as well as policy officials, in attendance, and unveiled such plans.
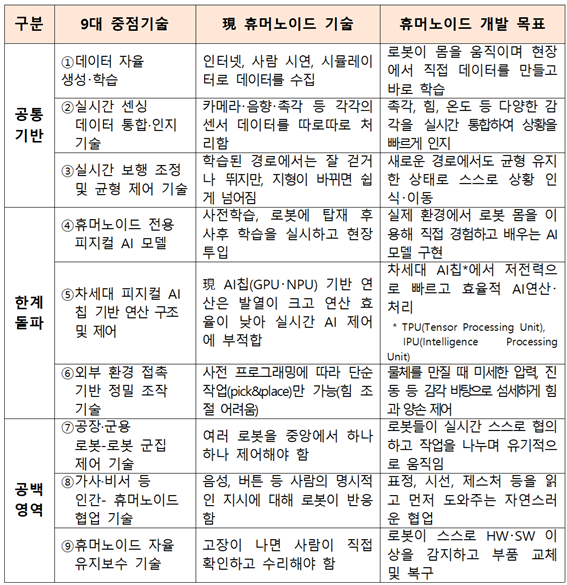
The 'Next-Generation Physical AI Model-Based Humanoid Future Technology Development Strategy (Draft)' introduced by the Ministry of Science and ICT on this day contains nine core technologies (technological innovation tasks) based on three axes: △Common Base, △Breakthrough, and △Research and Development Gap Area, in preparation for the era of universal humanoids by 2040.
First, robots will be developed to create data directly on-site by moving their bodies and learning immediately, integrating various senses such as touch, force, and temperature in real-time to quickly perceive situations and maintain balance in new paths, enabling self-recognition and movement.
Additionally, breaking through existing limits, AI models that directly experience and learn using robot bodies in real environments will be implemented. Next-generation AI chips will enable fast and efficient AI computation and processing with low power, and delicate force and dual-hand control will be possible based on subtle pressures or vibrations when touching objects.
Along with this, robots will autonomously negotiate in real-time to divide tasks, read expressions, gazes, gestures, and research natural cooperation that helps first. Development will also proceed to enable robots to detect HW/SW anomalies and perform part replacement and repair independently.
Kim Bo-yeol, Director of Public Convergence Technology Policy at the Ministry of Science and ICT, explained, "The goal is to develop from humanoids capable of simple tasks by 2030 to robots capable of non-verbal communication by 2035, and personal assistant robots by 2040," adding, "We will allocate new budgets to fully support technology development in the first half of next year."
The Ministry of Science and ICT plans to expand investment in these humanoid-related core technologies through the Future Pioneer Convergence Science and Technology Development Project. Based on the widely spread culture of convergence research, it will strengthen the system for accumulating, integrating, and demonstrating humanoid research results and introduce innovative research methods such as the 'Moving Target' system to respond to rapidly changing technological environments.
The main content of this humanoid development strategy will be reflected in the implementation plan for promoting convergence research and development in 2026.
Jeong Taek-ryeol, Director of Public Convergence Research Policy at the Ministry of Science and ICT, stated, "We will play a role as a priming water for leading the era of universal humanoids by selecting and investing in future preemptive technologies that are difficult for the private sector to prepare immediately."
jiany@fnnews.com Yeon Ji-an Reporter